| |
 |
|
>>
Products
>> Place
an Order
>>Request
Information |
Autonomous
Robotic Injury Assessment and Transluminal Surgery Aiding System
coremicro
Robot II |
This product was developed from
the technologies of the following awarded US Patents: 6,639,553;
6,480,789; 6,489,922; 6,240,367; 6,246,960; 6,278,945; 6,292,750;
6,311,129; 6,408,245; 6,415,223; 6,424,914; 6,427,122; 6,449,559;
6,459,990; 6,477,465; 6,480,152; 6,496,778; 6,516,272; 6,658,354;
6,671,622; 6,697,736; 6,725,173; 6,738,714; 6,879,875; 7,162,367;
7,409,290; 6,311,555; 6,427,131; 6,456,939; 6,473,713; 6,494,093;
6,508,122; 6,516,283; 6,522,992; 6,611,170; 6,651,027; 6,671,648;
6,697,758; 6,415,227; 6,622,090; 6,704,574; 6,795,772; 7,143,130;
6,157,891; 6,463,357; 6,596,976; 6,704,619; 7,239,975; 7,239,976;
7,548,835 and 6,127,970
|
|
The intelligent injury assessment
and surgical aid system performs autonomous evaluation of casualties,
searches, detects, and navigates to a casualty, determines his/her
condition, and performs diagnostic imaging to asses the level of
difficulty in an ensuing extraction. In addition, the integration
of the Coremicro Robot Arm provides an efficient platform in object
assessment applications and for aiding in transluminal surgery conducted
in the field. Systems and functionalities include:
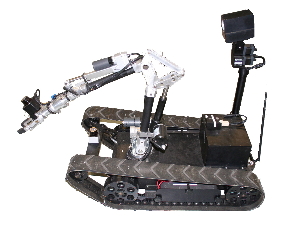
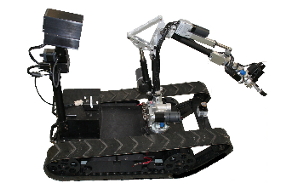
- Coremicro Robot
The Coremicro Robot is a tracked robot with forward track struts
and idler wheels for rough terrain navigation. The robotic platform
includes a suite of sensors, gimbaled cameras, laser range finder,
lidar scanner, and 6 DOF manipulator for medical applications.
The Coremicro multi-robot systems significantly aid medical personnel
by providing casualty identification, injury assessment, transportation
of medical supplies and their delivery, transluminal surgery support,
and evacuation of a casualty to a higher level medical facility.
- Coremicro Robot Arm
The Coremicro Robot Arm integrated within the Coremicro Robot
provides an efficient platform for medical applications. The arm
consists of a high precision six DOF manipulator for providing
sufficient dexterity in positioning sensors in close proximity
to assessment points and for performing surgical tasks. End-point
control is carried out by the Coremicro Robot Control Processor.
The sensor interface is managed by the Coremicro Sensor Fusion
Processor.
- Injury Assessment
Depending on the mission requirements, the sensor module affixed
to the end effector may carry a combination of lidar, IR camera,
and other biological and/or chemical detectors. The robot’s
sensors and navigation device allow it to autonomously reach casualties
and medics under adverse field conditions. The robot is then able
to collect the appropriate information about the casualty’s
condition so as to execute accurate triage.
- Medical Aid
The Coremicro Robot may be able to first provide aid to alleviate
respiratory distress. Should signs point to possible spinal cord
injury, further use of ultrasound or infrared imaging leads to
a stabilization phase. The imaging processes used for the spine
provide the medium for assessment of other possible injuries that
may necessitate further casualty immobilization.
|
|
| |
|





