| |
|
|
|
|
|
||
| |
|||||||
 |
 |
 |
 |
 |
 |
|
|
IMU
REALTIME SIMULATOR
AGNC-2000 RTIS |
|
This product was developed from the technologies of the following awarded US Patents: 6,127,970; 6,234,799; 6,298,318; 6,473,034 and6,735,523. |
|
|
The
IMU Real-Time Simulator is designed to dramatically reduce the need
to perform expensive and time-consuming field trials for testing,
evaluating and qualifying vehicles. Parametric inputs allow the
system under test to accommodate the specific configuration of interest,
including motion description, vibration model, environmental model,
sensor and system error model and parameter estimation considerations.
Real-time hardware-in-the-loop evaluations and general purpose off-line
simulations are readily accommodated.
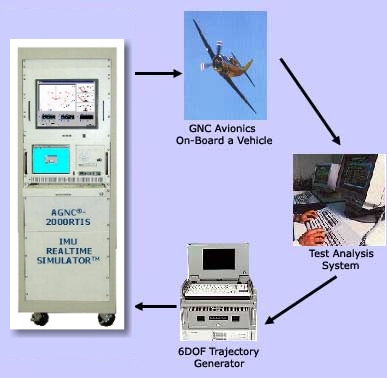
Used as Installed System Test Equipment, it generates IMU signals on the ground, under static conditions, identical to what would be encountered if the vehicle was flying. Its design features support the final integration of a developmental Guidance, Navigation, or Control (GNC) system installed in a vehicle. It assures testers that GNC avionics on-board the vehicle work properly before and during a flight test. It also helps to debug on-board GNC avionics and verify system performance. The RTIS receives real-time flight data from the 6 DOF flight simulator and generates IMU electronic signals according to the IMU measurement models and error models defined by the user. Emulated electronic signals are injected into the installed avionics system which causes the on-board GNC system computer into "thinking" that the vehicle is actually flying. In the engineering field basically all of our work involves MDASE (Modeling, Design, Analysis, Simulation, Evaluation); the RTIS is designed to circumvent the need to repeatedly execute field tests. For example it:
The RTIS provides an extensive software emulation of IMU signals with derived signals related to variables, such as, position, velocity, acceleration, attitude and angular rates, and with flexibility for interfacing to open or closed-loop hardware-in-the-loop configurations. |
|
|
System Features: Real-Time Electronic Signal Generation. Five types of signals can be produced: analog, pulse, digital serial, digital parallel and time-tagged data packets. The generated IMU signals are injected into the installed system to excite the navigation or guidance system electronics and computers during the emulated ground test or the hardware-in-the-loop laboratory test. User Defined Simulator Configuration and Operation Mode. The intelligent graphic user interface (GUI) lets the user select the connection to the 6DOF trajectory generator, choose the IMU signal type and format, set the IMU error models, and assign the signals to be displayed. Catalog of IMU Models and Signal Configurations. Open System Structure Design. The open structure computation platform provides advantages of hardware configurability and implementation flexibility. Standard Signal and Connection Design. Can meet the requirements of military and commercial applications.
High Reliability and Excellent Electromagnetic
Compatibility.
|
|
All Rights Reserved